Robotic Softness: Materially Sensitive Fabrication Strategies for Architectural Production
ESR10- SIMULATING ROBOTIC FEEDBACK
AUTHOR: Giulio Brugnaro
The research starts with questioning the current paradigm for architectural production established during the Renaissance, based completely on notation and geometric representation, where only what can be drawn and measured, can be built. (Carpo, 2011)
This operational framework poses critical limitations in the way the overall design process is conceived as a linear progression from a model to its materialisation impeding any type of feedback among the different stages of the process which are sequentially organized and neatly distinct from each other.
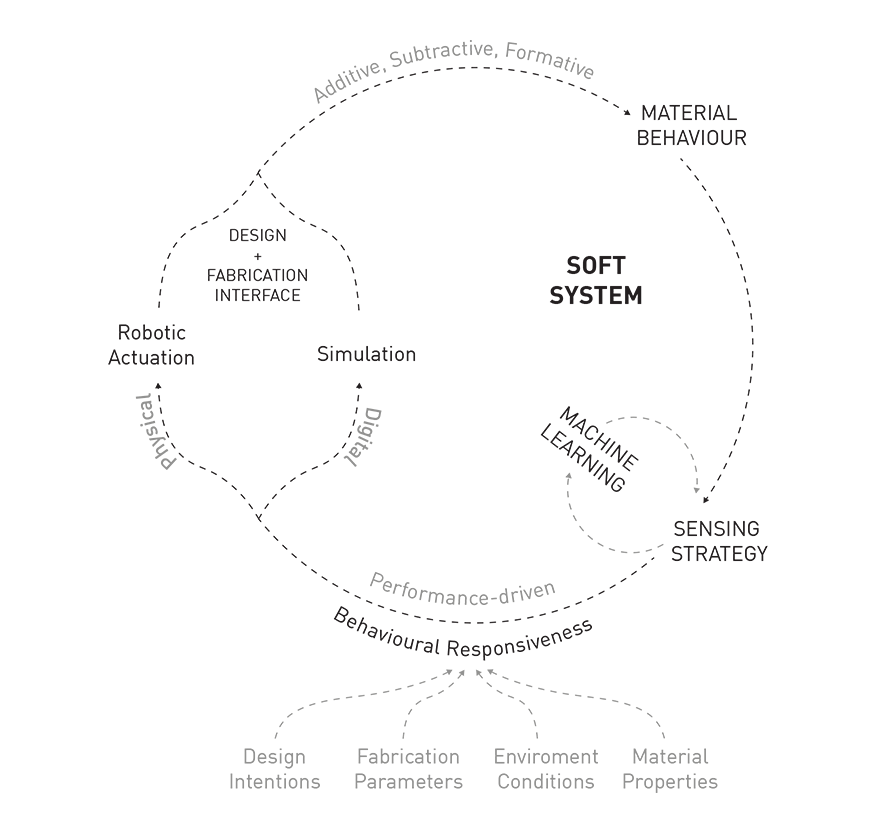
In order to move beyond these operational boundaries, the research proposes to frame a robotic fabrication process as a “soft system”, a system that is “flexible, adaptable and evolving […], maintained by a dense network of active information or feedback loops”. (Kwinter, 1993) Within this new paradigm, the moment of design and fabrication are blurred together and they both unfold in real-time on the digital and physical realm, constantly gathering sensor data about the fabrication setup, environment conditions and material behaviours.
References:
Carpo, Mario. The Alphabet and the Algorithm. Cambridge: MIT Press, 2014.
Kwinter, Sanford. Soft Systems. New York: Princeton Architectural Press, 1993.