CITAstudio Glulam Workshop: September 5-16
ESR2- INTEGRATING MATERIAL PERFORMANCE
AUTHOR: Tom Svilans
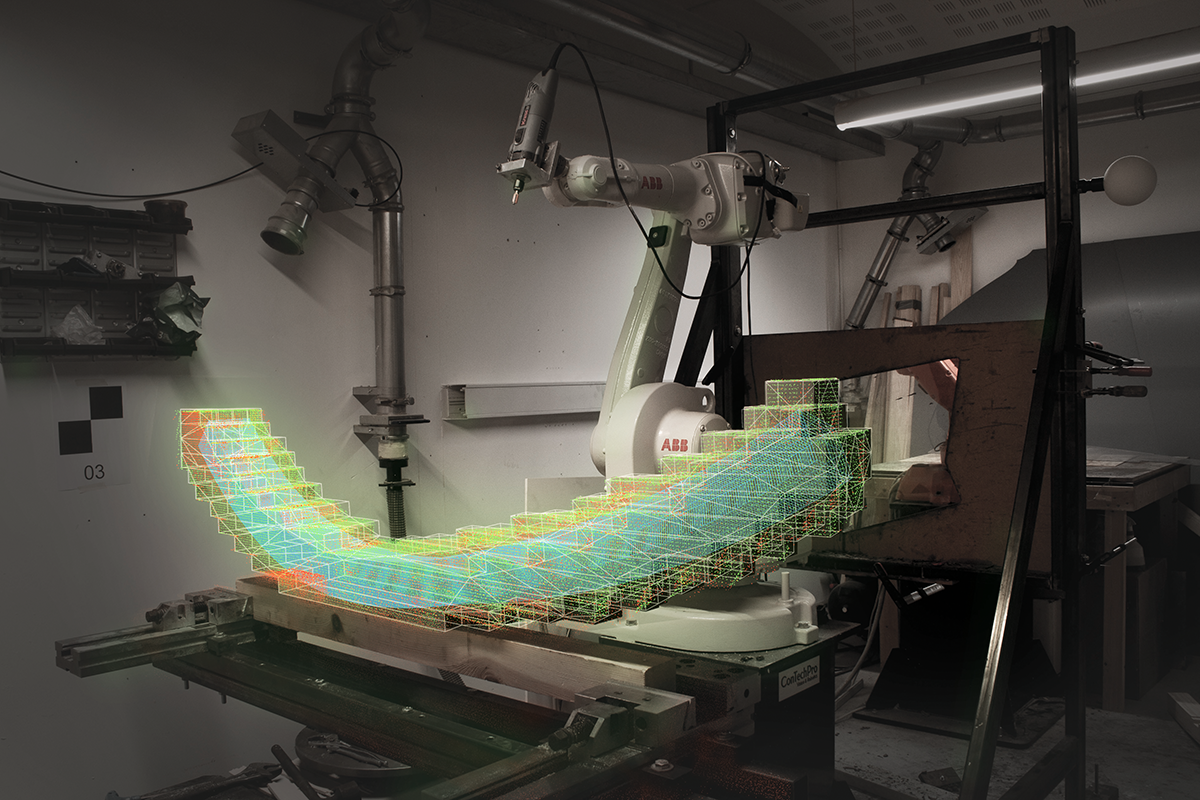
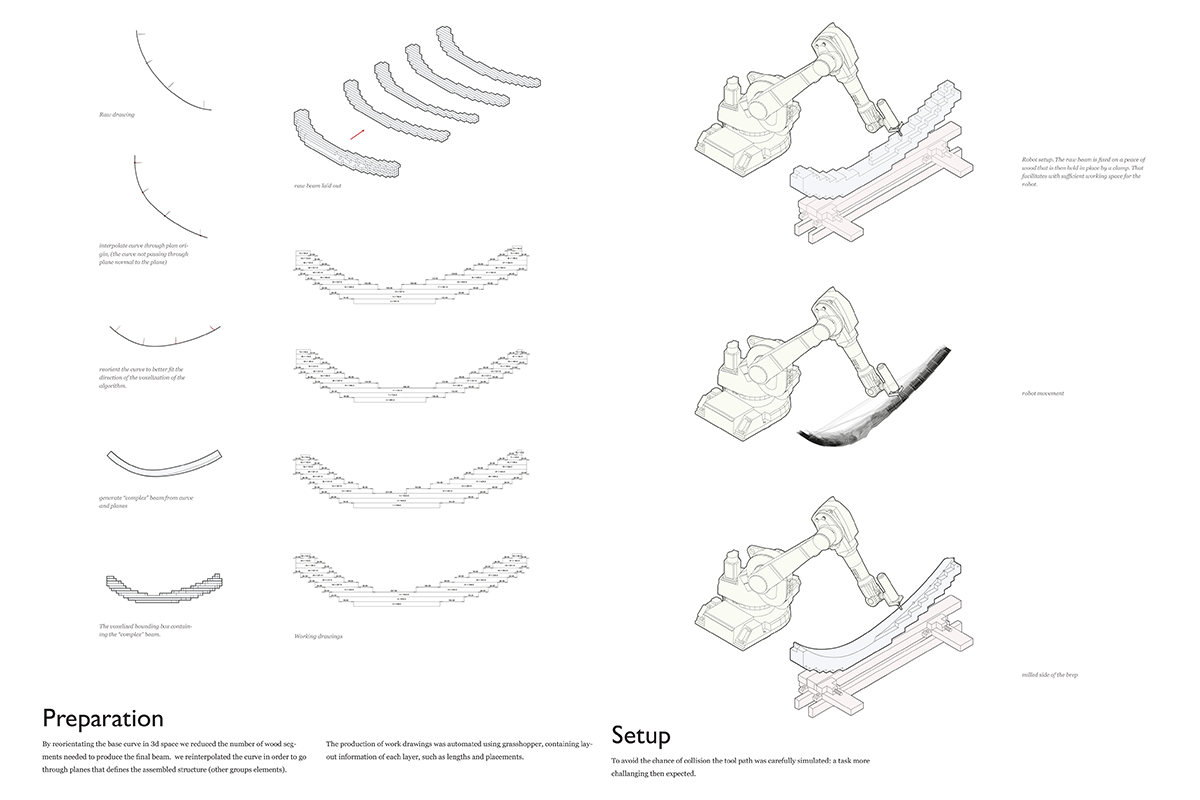
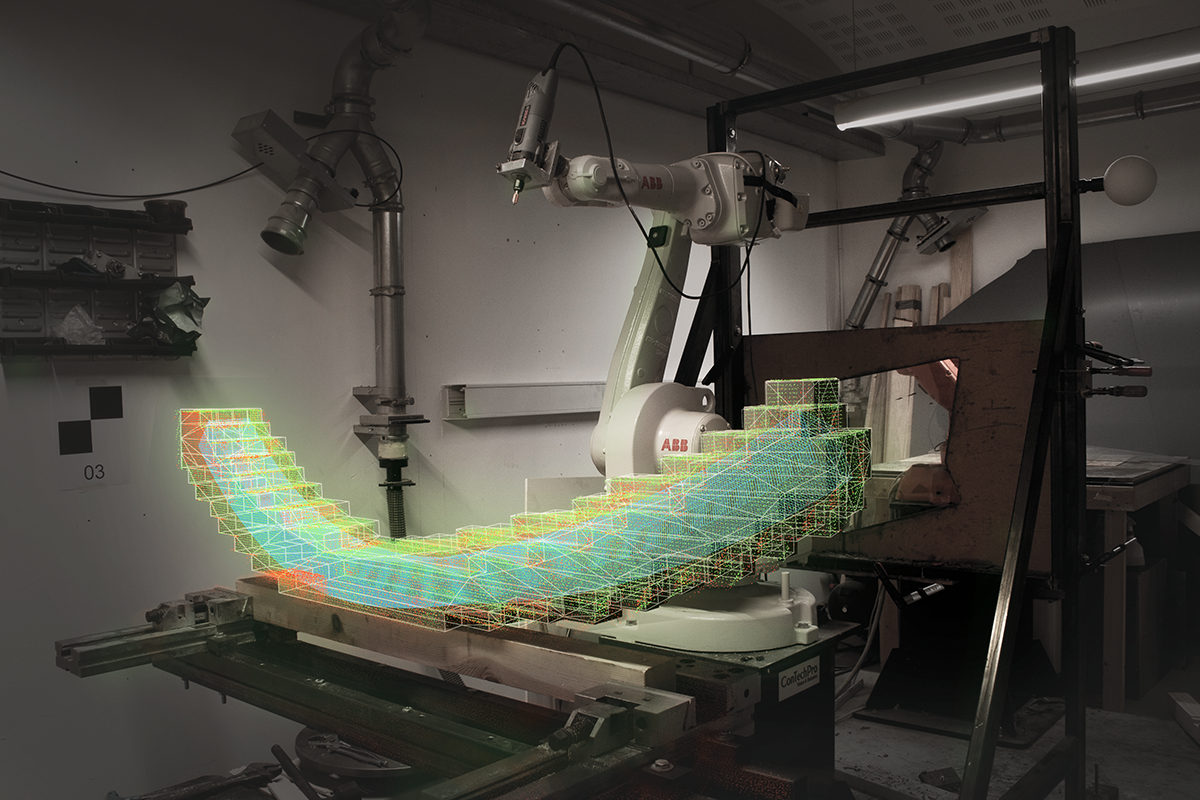
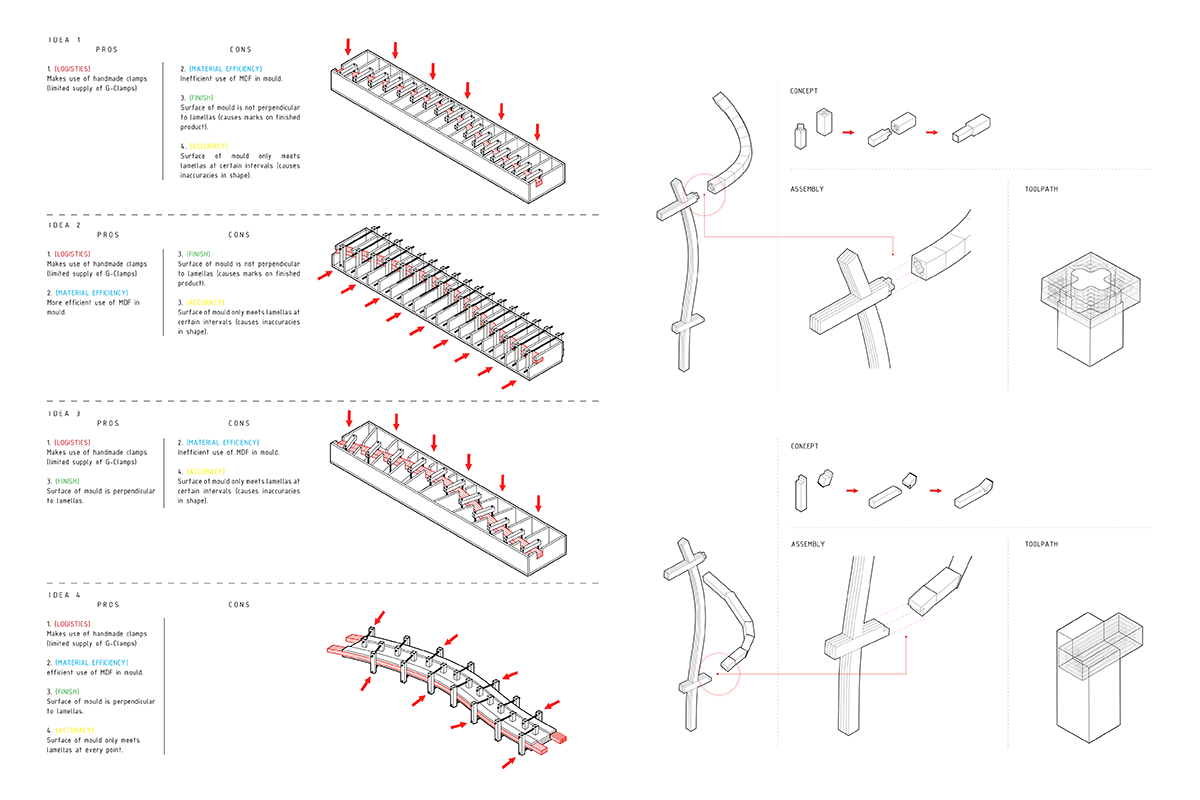
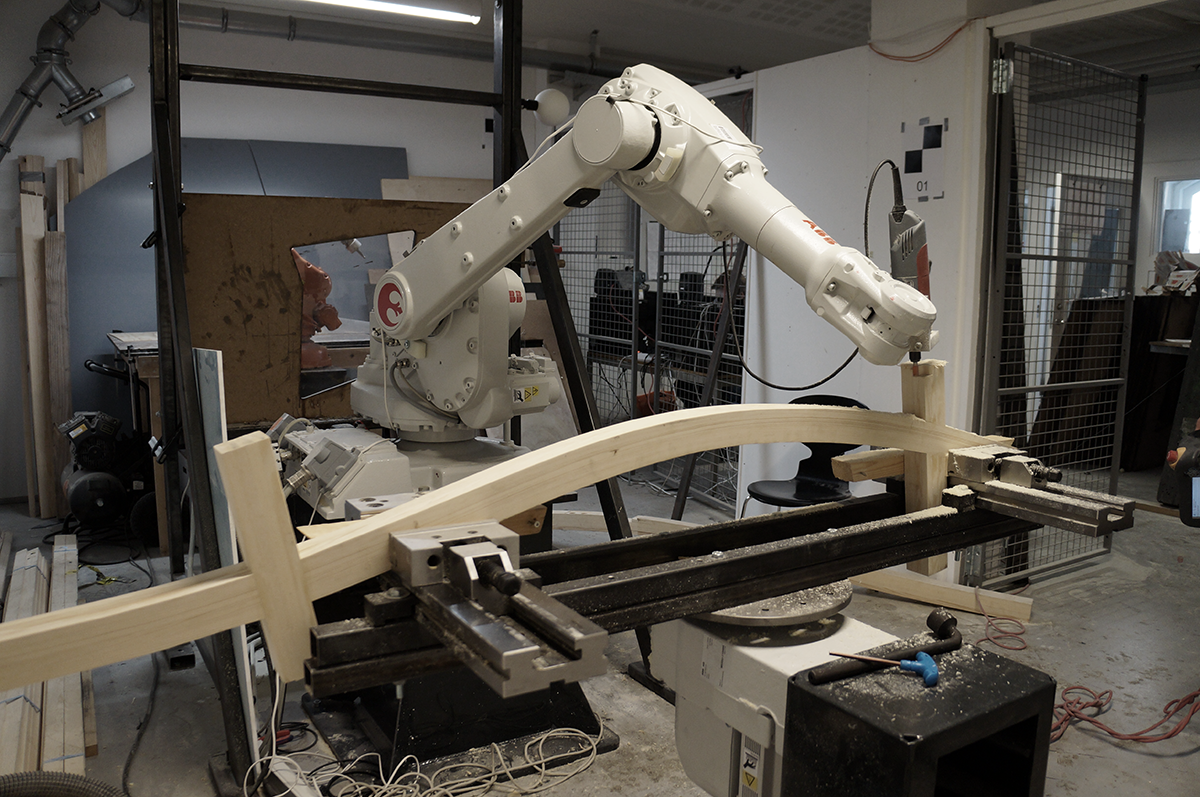
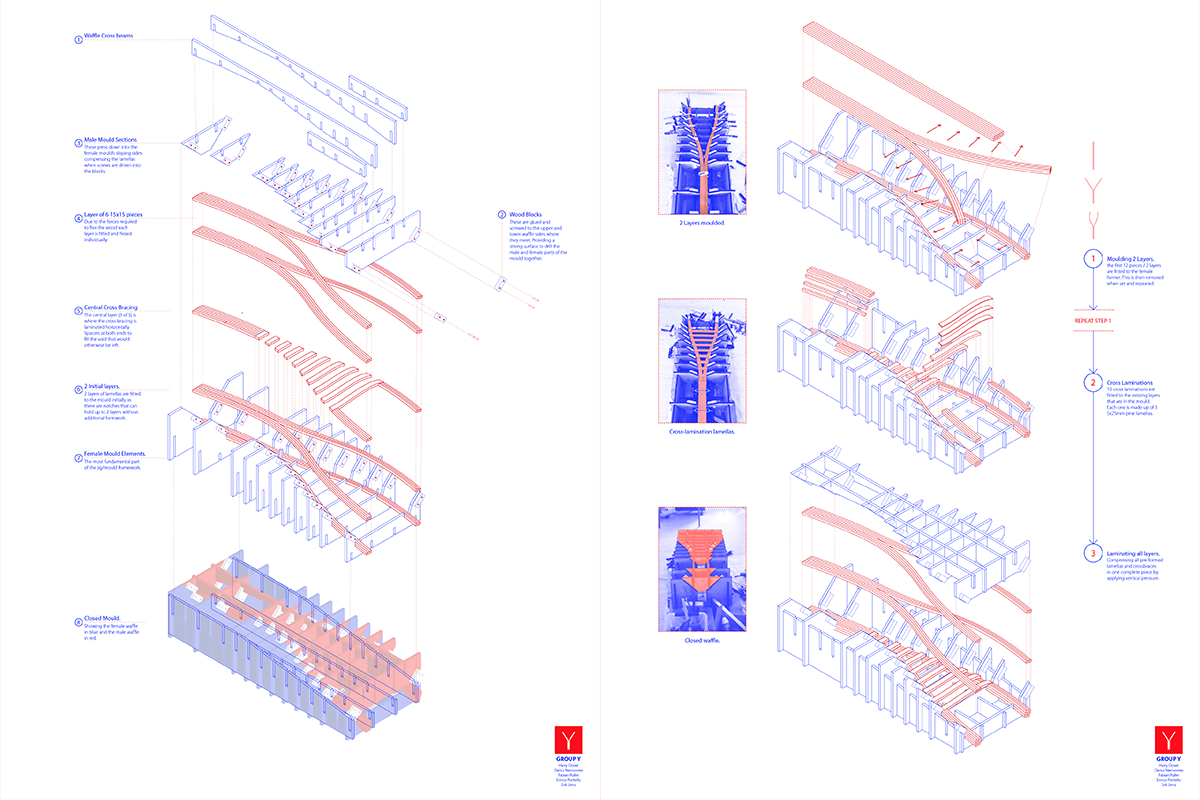
September 27, 2016. A couple of weeks ago I ran a design/build workshop for the CITAstudio Masters students here at KADK in Copenhagen. The workshop had two aims: to explore the design and fabrication of five speculative glulam blank types, and to move through the design-to-production chain from schematic design to machining connection details. This involved introducing the students to engineered timber – both as a material and the world of contemporary engineered timber construction, 3d scanning, and robotic machining. It was also an opportunity to stress-test the collection of scripts, tools, and libraries I have been developing and see what breaks where. Students were given a digital design sketch with an overall structural layout and each group had to design and make a glue-laminated member using one of the five defined types. Each type explored a different facet of the research questions that I have set out, manifesting some combinations of different processes and performances – mould-making, fibre orientation, cross-lamination, waste, joining techniques, etc.
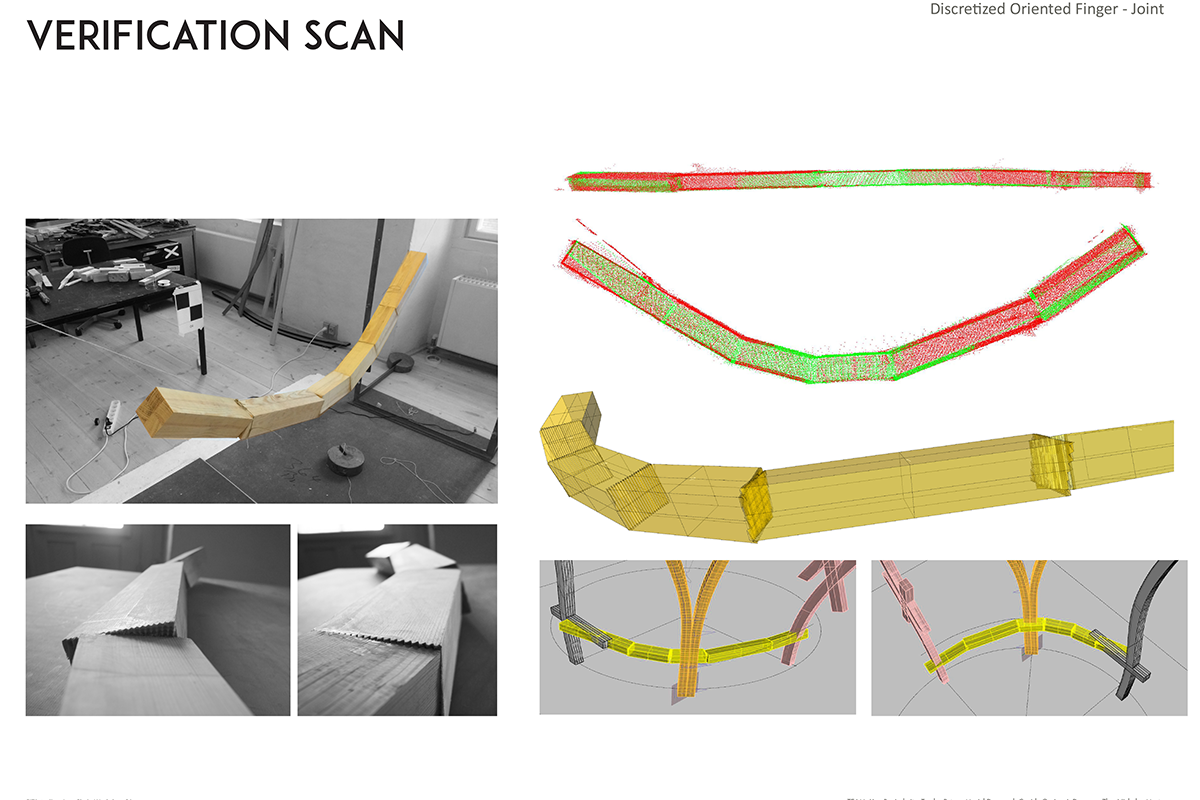
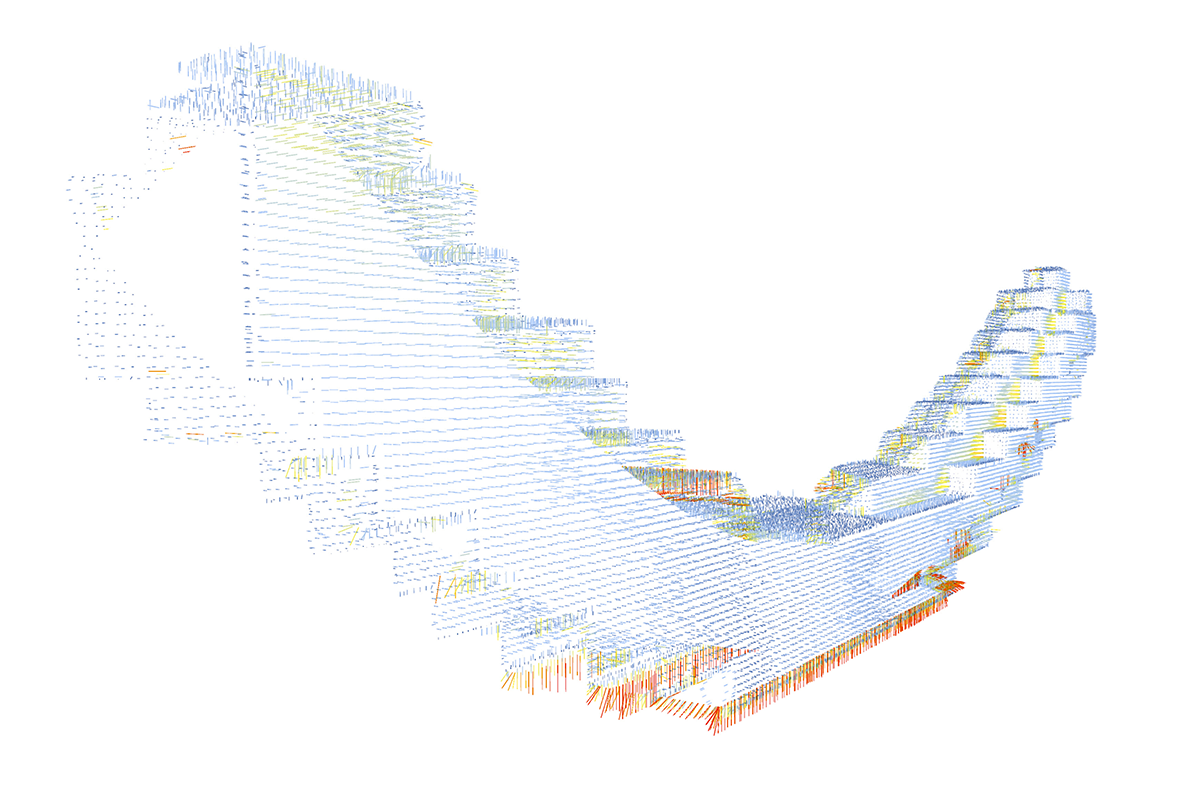
Crucial to all of this was also the use of 3d scanning as a tool for verification and analysis in between each step of the process – the blanks were scanned to measure deviation from the model, the model and connection geometry were adjusted to account for these differences, and the more complex members were located in the machining volume using the scans. Toolpath strategies were also introduced as a way to think about design from the tooling point of view and how to describe physical features with non-representational models that include the ordering of each machining operation and the resultant geometry.
Some of the tools developed for the workshop rely on the point cloud data types in Volvox (Henrik Evers, Mateusz Zwierzycki). Robot program generation, simulation, and visualization are done using the excellent open-source Robots library (Vicente Soler).





Students: Harry Clover, Darius Narmontas, Fabian Puller, Enrico Pontello, Erik Lima, Mads Brandt, Emil Buchwald, Nicholas Mostovac, Sebastian Gatz, Teodor Petrov, Lina Baciuskaite, Jonas Mortensen, Gina Perier, Claudia Schmidt, Brian Cheung, Johan Pedersen, David Schwarzman, Mariel Dougoud, Luca Breseghello, Gabriella Rossi, Pamela Clover, Cepide Garivani, Daoyuan Zhu, Jamie Walker, Leonardo Castaman, Stian Holte
Tutors: Tom Svilans, Paul Poinet