Digital Design & Full Scale Fabrication Course – IoA
CONTROLLED ACTIVE BENDING STRUCTURES
“The form is a system which organises itself in the presences of both internal and external forces and these organizations can shape patterns traced through mathematical rules.”
D’ Arcy Thompson
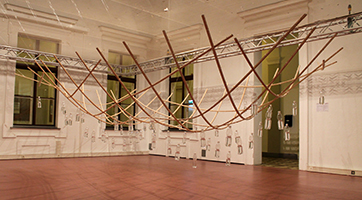
In this framework, this 5-days course focuses on the creation of controllable, dynamic, active-bending timber structures, using loads as the actuators. The participants experimented with linear wooden elements (laths), where the milled geometry between them defines the overall deformation of the system. The course combines digital simulations of form finding (Kangaroo) and structural analysis (Karamba) with physical prototypes, fabricated by robotic milling. The final outcome is a 1:1 gridshell structure which has been fabricated flat and has been self-organized into a doubly curved surface due to the applied loads.
DESIGN TEAM
Tutors:
Research: Efilena Baseta
Robotic fabrication: Philipp Hornung
Structural analysis: Andrei Gheorghe
Students:
Adrian Herk, Afshin Koupaei, Aleksandra Belitskaja, Alex Ahmad, Alexandra Moisi, Andrej Strieženec, Anna Tuzova, Ben James, Charlotte Krause, David Rüßkamp, Jan Ková?í?ek, Jelinek Johanna, Jonghoon Kim, Julian Heinen, Kaspar Ehrhardt, Leonie Eitzenberger, Ludmila Janigova, Madeleine Malle, Michael Tingen, Minho Hong, Polina Korochkova, Rudolf Neumerkel, Sadi Özdemir, Shaun Mccallum, Toms Kampars, Zarina Belousova.
Special thanks to the department of Wood Technology and the Robotic Lab of the University of Applied Arts of Vienna (Angewandte).
Dates: 14-19/12/2017
Location: Institute of Architecture – University of Applied Arts of Vienna, Austria
Find more info about the results of the course here.
Watch the video of the course here.